・新しいロボットは、任意のオブジェクトを選択して特定の場所に投げることを学習。
・ディープラーニングと発射体物理学の両方を使用して、構造化されていない設定でオブジェクトを正確かつ迅速に投げることが可能。
・トレーニング時間の14時間以内に、85%の投球精度を達成し、87%がクラッターの信頼性を把握することが可能。
過去10年間で、ロボットをスマートにして特定のタスクをより効率的に実行し、実際の経験から学習できるようにすることで、大きな進歩が見られるようになりました。ただし、キャッチ、スイング、スピン、トスなどの基本的なスキルに関しては、依然として人間よりもはるかに劣ってはいます。
現在、Google、MIT、プリンストン大学、コロンビア大学の研究者は、特定の場所に任意のオブジェクトを選んで投げることを学ぶことができる新しいロボットアームを開発しました。物理学と深層学習の両方の方法を使用して、構造化されていない設定でランダムなオブジェクトを正確かつ迅速に投げます。
彼らはこのロボットをTossingBotと名付けました。有効範囲が2倍になり、従来のロボットの最大2倍のピッキング速度を実現することが可能となりました。
革命への挑戦
ロボットにとって、ものを投げる作業というのは簡単な作業ではありません。さまざまな形状のオブジェクトがどのようにピックアップされるかから、質量、空気力学、摩擦などのオブジェクトの物理的特性まで、さまざまな要因が関係してくるからです。
たとえば、重くて長いオブジェクトをその端から選んで投げると、中央から選んだ場合よりも遠くに着地します。ただし、ピンポン球のような軽い物体を選ぶ場合、同じ距離で投げるには(空気抵抗のために)大きな力が必要になります。
任意のオブジェクトごとにこれらすべてのパラメータを明示的に制御する手法を手動で開発することはほとんど不可能です。試行錯誤の手法を適用することも、費用と時間がかかるため、お勧めできません。
ディープラーニングと物理学の組み合わせ
ディープラーニングは、ロボットがケースバイケースのメカニズムに依存するのではなく、経験から学習するのに役立ちますが、オブジェクトをターゲット位置に正確に投げるには、発射体の物理学を十分に理解する必要があります。
これらの両方の機能を統合することにより、エンジニアはTossingBotが迅速にトレーニングし、一般化できるようにしました。ロボットは、発射体物理学の基本法則を使用して、初期コントローラーを開発します。たとえば、特定のオブジェクトをターゲット位置に投げる速度を計算します。

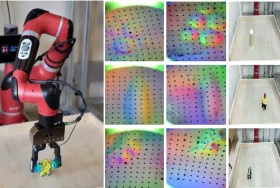
次に、ニューラルネットワークは、その物理計算に加えて調整を予測し、現実世界の変動やノイズなどの外部要因を補正します。トレーニングに加えて、ロボットアームはNVIDIA Titan GPUを使用して、シーン(RGB深度カメラでキャプチャ)をリアルタイムで3Dで再構築し、アームが動き回るときに3Dデータを集約します。
トレーニング時間の14時間以内に、TossingBotは85%の投球精度を達成し、87%がクラッターの信頼性を把握しました。最大到達範囲外に配置されたボックスに500を超える任意のオブジェクトを選択して投げることができました。
次なる課題とは?
大体予測できる通りロボットには欠点があります。たとえば、オブジェクトは着陸の衝突に耐えるのに十分な強度があることを前提としています。また、視覚情報からのみ制御変数を評価します。
次の研究で、研究者は着地を緩和する方法で物体を捕らえるように訓練をします。彼らはまた、ロボットアームがその投擲速度をより良く適応させることを可能にするかもしれない追加の感知モダリティ(触覚や力トルクのような)を探求することを計画しています。