人工知能(AI)は非常に複雑なテーマです。AIがついに登場したとき、どういうことになるのか予期できませんでした。SF映画で、AIで動くロボットたちが、人間よりもはるかに優れていると自負しているのを見たことがあるでしょう。
人間でさえ、AIが何を構築し、何を学習し、どのような結果をもたらすのか知らないのですから、この部分のほとんどは真実であるように思われます。これは人間の思い上がりの危険性についての小さな警告ですが、だからといって私たちの探求を止めることはできません。
何ができるかという好奇心こそが、私たちが恐るべき技術の実験と開発を続ける最大の理由なのです。この記事では、学習し、特定のタスクを実行するように設計された、いくつかの高度なロボットを紹介します。ぜひご覧ください。
14. アリ型ロボット
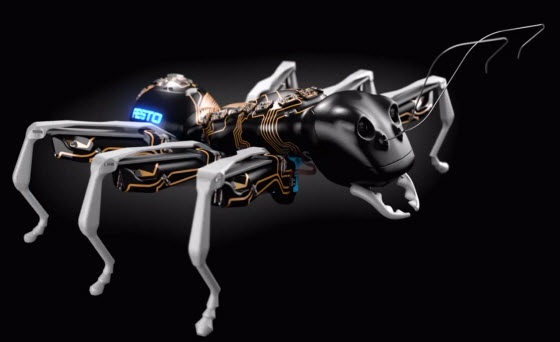
この小型ロボット(名称はBionicANTs、FESTO社が開発)は、本物のアリの行動を模倣しています。ロボットたちは自律的に行動しますが、複雑なタスクを完了するために互いに通信します。
3Dプリントされた特別なデザインは、美しさと機能を兼ね備えています。充電ステーションに接続するためのアンテナが内蔵されています。脚のモーターにはピエゾセラミック【電圧をかけて振動させる、圧力を電圧に変換することができる圧電セラミックス】の技術が使われており、わずかなエネルギーで素早く正確に曲げることができます。マウスセンサー、コンパス、2つのカメラがアリの位置決定に役立ちます。将来的には、大きな仕事をこなせるようになるでしょう。
13. 歩くこともできる飛行ロボット
これは、発明者のLudovic DalerにちなんでDALER(Deployable Air-Land Exploration Robot)と名付けられた、生体模倣ロボットです。吸血コウモリから着想を得た適応形態学を用いています。このロボットは、捜索救助活動や、広い空間での短時間の探索、近づけない危険な場所に徒歩で到達するために開発されています。
翼は柔らかい布でできており、折りたたみ可能な骨格機構を使用しているため、翼としても脚としても使用できます。最高時速72kmで飛ぶことができ、地面に着くと毎秒6cmの速さで這うことができるのです。今のところ、DALERは離陸する際に少し押す必要があるものの、将来的には自力で離陸するようになるでしょう。
12. The Cubli
ジャンプしたり、バランスを取ったり、机の上を歩いたりできる強化立方体で、モーメンタムホイール【高速回転するのが特徴で、主に宇宙船などの姿勢制御に用いられる】、ギア、モーター、バッテリーを搭載しています。この運動方法を惑星探査に利用した研究者もいれば、自己組み立て型ロボットに利用した研究者もいます。
立方体の軸のバランスを保つ方法はたくさんありますが、ジャンプしたり歩いたりするには、エネルギーを急に放出する必要があります。モーメンタムホイールは、この立方体をコンパクトに自己完結させながら、十分なエネルギーを蓄えるために使われます。また、車輪を加速または減速させる際に、車体のバランスをとるための反力トルクベースの制御プログラムの実装にも使用できます。
11. ゴキブリ型ロボット
アメリカ陸軍が、ゴキブリをモチーフにしたロボットを開発したプロジェクトに資金を提供しました。カリフォルニア大学バークレー校は、センサーやソフトウェアを追加することなく、インテリジェントなロボットを作りました。このロボットは6本脚の小さなロボットで、狭い場所を通り抜け、障害物を避けることができます。
研究チームは、このロボットを、平らな楕円形、楕円形の円錐形、長方形の3つの異なる形状でテストしました。その結果、丸みを帯びた貝殻だと、余分なセンサーを使わなくても、障害物をうまく避けて通り抜けできることがわかりました。研究チームは現在、直面している障害物のタイプに合わせて、必要に応じて形状を変更できる将来のロボットを考えています。
10. 小型の壁登りロボット
この小さなロボットは、100倍の重さを背負ったまま垂直の壁を登ることができます。このスーパーロボットは、カリフォルニア州にあるスタンフォード大学の機械エンジニアによって作られました。
ヤモリにヒントを得たこのロボットの足には接着剤が塗られており、ゴムのスパイクで覆われています。圧力をかけるとスパイクが曲がり、表面積が増えるので粘着力が増します。このスパイクは、ロボットが足を持ち上げるとまっすぐになり、簡単に外れます。最も印象的なのは、2千倍の重さを引っ張ることができるμTug(重さ12グラム)です。将来的には、工場や建設現場で重いものを持ち上げるのに役立つでしょう。
9. RoboBee
RoboBee(ロボット蜂)は、ミツバチの生態や昆虫の巣の行動にヒントを得た小型ロボットです。ハーバード大学のロボット研究チームによって開発されました。1秒間に120回の羽ばたきが可能な人工筋肉を使って、係留飛行ができます。今のところ、昆虫をモデルにして飛行を実現した最小の人工装置(翼幅3cm)です。
目標は、人工授粉や捜索、救助などの用途に向けた、完全な自律飛行ロボットの群れを開発することです。動力は小型の細いつなぎ綱から供給されます。このプロジェクトを実現可能にするために、研究チームは無線電力ソリューションと意思決定機能を解明する必要があります。
8. 蜘蛛型ロボット
Bigfoot Inverse Kinematics Engineを搭載し、合計26個のサーボモーターを使用した生体模倣ロボットです。多脚歩行ロボットの制御に必要なすべての数学的計算を処理することができます。しかし、完全に自動化されているわけではありません。例えば、特定の速度で前方に歩くといった指示を(ワイヤレスリモコンを使って)送る必要があります。それでも、脚の軌道計画、inverse kinematics【連結されたものがとある点に向かうようにする動作】、モーター制御、脚の協調といった細かいことはすべて機械が行います。
7. ペッパー:感情を認識するロボット

出典:aldebaran
ペッパー(Pepper)は感情を読み取り、声のトーンや顔の表情を認識し、人間と対話したり、生活したりするように設計されています。日本最大手の携帯電話会社、ソフトバンクモバイルが開発しました。残念ながら、掃除も料理もしないし、超能力もありません。しかし、発売開始後1分も経たないうちに、最初の1,000モデル(基本価格1600ドル)は日本で完売しました。
ペッパーは、音声、触覚、感情でコミュニケーションできるソーシャルロボットです。身長4フィート、体重61ポンドで、「内分泌型多層ニューラルネットワーク」に多数のカメラ、タッチセンサー、加速度センサーを搭載しています。
このマシンは、人の声のトーンや顔の表情に影響される独自の進化した感情を持っています。今のところ、英語、日本語、フランス語、スペイン語で話すことができます。今後数ヶ月のうちに、アプリストアで利用できるアプリや言語が増える予定です。
6. Hector
Hector(Hexapod Cognitive autonomously Operating Robotの略【六脚型認知自律動作ロボット】)は、ドイツのビーレフェルト大学の研究チームによって作られました。ナナフシの動きにヒントを得ています。昆虫のように行動し、周囲でどのように動くべきかを判断(または経験から学習)することができます。
このロボットには6本の手足があり、それぞれ独立して動くことができるため、歩いている表面に素早く適応することができます。また、センサーと近距離カメラを使って、進路上にある予測不可能な障害物を乗り越える方法を見つけ出すことができます。その体は、炭素繊維強化プラスチック製の非常に軽い外骨格と、筋肉の動きを模した18個の受動的電気関節でできています。
5. 自己修復ロボット
動物と同じように、ロボットもダメージを受けたときに代替行動を見つけるために「常識にとらわれない」ことができるようになりました。ピエール・マリー・キュリー大学【旧パリ第6大学】の研究チームは、損傷に応じてロボットの行動を変えることができる試行錯誤のプログラムを作成しました。
研究チームは、6本足の小型ロボットでアルゴリズムをテストしました。予想通り、このロボットは多くの種類の損傷(手足の骨折など)を受けても、前進歩行する最適な方法を見つけました。また、このプログラムをロボットアームでテストしたところ、関節の2つのモーターが14種類の方法で損傷しても、そのタスクを実行し続けたのです。
4. MITのチーター型ロボット
マサチューセッツ工科大学(MIT)の研究者たちが、チーターにインスパイアされたロボットを設計しました。このプロジェクトは、DARPA(国防高等研究計画局)のMaximum Mobility and Manipulation部門から資金提供を受けています。このロボットは将来、災害救助に役立つと考えられています。
このロボットは、2Dレーザーベースのセンサーを使ってハードルを見ることができ、それを飛び越えるための最適な方法をリアルタイムで計算することができます。重さ32キロのマシンは、ジャンプ後に着地し、そのまま走り続けます。非常にダイナミックな動作をするよう特別に設計されており、現在、研究チームはチーターが実際の世界でどのように動作するかを観察するため、野外でのテストを計画しています。
3. 四足歩行ロボットSpot
2005年、ボストン・ダイナミクス社は四足歩行ロボットBigDogを発表しました。そして今、より小型で進化したSpotが登場しました。電動、油圧作動、4本足のこのロボットは、しっかり蹴ることができます。
体重72.5kgのこのロボットは、段差を軽々と登り、急な坂道も軽快に歩くことができます。脚はヤギの脚のように後方に傾斜しており、ヤギのように飛び跳ねることもできます。ナビゲーション、階段の昇降、人と一緒に走ること、他のロボットと一緒に移動することに、スキャンLIDARを使用します。バランスを保つことでよく知られており、ビデオでは非常によく実証されています。ボストン・ダイナミクス社は、屋内外での運用を想定して開発されたという以上の情報は明らかにしていません。
2. ロボットアーム侍
日本の研究者たちがロボットに刀の振り方を教え始めましたた。2015年4月、並木研究室【千葉大学】は高速6軸マテリアルハンドリングロボット「Motoman MH24」を製作しました。このロボットは、組立、調剤、材料供給、包装などの用途に使用されるよう設計されています。
「安川武士道プロジェクト」のために、安川電機は町井勲氏(居合術の達人)と協力しました。町井とMH24ロボットアームは、果物、花、水平に置かれたピーポッドを真横に切り裂くという5つの課題をクリアしました。このマシンは町井に劣らず効果的で、さらに休む必要がないという利点もあったのです。
1. 人型ロボットHUBO
HUBOは、DARPAロボティクス・チャレンジ(DRC)2015で優勝した人型ロボットです。韓国科学技術院(KAIST)によって開発され、2005年1月6日に発表されました。このロボットは複数のタスクをこなすように作られています。
DRC-HUBOは5カ国の22台のロボットと対戦し、200万ドルのグランプリを獲得しました。運転、車からの降車、歩行、ドアの開閉、障害物の除去、段ボールへの穴あけ、階段の昇降などのタスクをこなしました。すべての課題を44分28秒でクリアしたのです。車輪付きの機械から歩行する二足歩行に切り替えられる「トランスフォーマー」能力が、勝利の鍵となりました。