AIとロボット工学は間違いなく今最も有望な研究分野の2つであり、人類の未来を定義する重要な分野です。現在私たちは、洗練されたデザイン・機敏で非常に有能なボディを備えた超近代的なマシンを持っており、ほぼすべての種類の作業を効率よく行うことができます。
AIは常に興味深いテーマですが、私たちのウェブサイト上で数え切れないほどお話していると思いますので、今日はロボットについてお話します。ご存知のように、ロボットを区別する方法はたくさんありますがこの記事ではさらに多くの方法を説明したいと思います。
基本的に、ロボットは2つの大きなカテゴリーに分けられます:用途に基づいて分類され、更に運動学または運動力に基づいて分類されます。以下記事では運動学に基づいてロボットを分類し、説明していきます。
ロボットアームまたは静止ロボット
1.デカルトロボット

デカルトロボットとは、産業目的と商業目的の両方で使用されるロボットの最も一般的なタイプです。ガントリーロボットと呼ばれることもあります。彼らは3つの直線軸を持っており、回転するのではなく直線で構成されています。デカルトロボットの機械的配置は、他のほとんどの静止ロボットよりもはるかに簡単です
2.円筒形ロボット
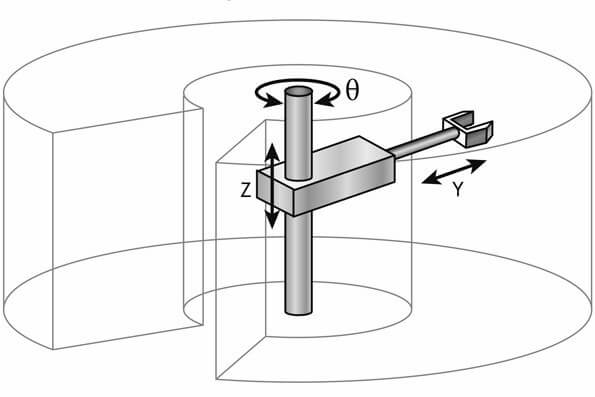
一般的に円筒形ロボットは、組み立て・スポット溶接・機械ダイカストに使用されます。これらのタイプのロボットだと、最近ではあまり使用されませんがとても有用なロボットではあります。名前が示すように、円筒座標系の作業システムを形成します。
上の図でわかるように、円筒形ロボットは3つ軸で構成されおり、Z軸は回転と垂直移動・Y軸は線形の様に移動します。時々、円筒形ロボットが誤ってスカラロボットとみなされたりその逆が起きてしまうことがあります。その2つはほとんど似ていますが構造と応用分野が異なります。
3.スカラロボット
スカラロボットまたは水平多関節ロボットアーム/多関節ロボットアームは、取り付けが容易であり、一般的に使用されています。これらのタイプのロボットの欠点の1つは、かなり安価なデカルトロボットに比べて非常に高価であるということであり、更に動作するために高レベルで複雑なソフトウェアが必要となります。
4.並列ロボット

般的に並列マニピュレータとして知られており、マシン制御のロボットチェーンの束がエンドエフェクタを補助しています。使用例として、軍や商業のパイロットが使用しているフライトシミュレータが挙げられます。パイロットが現実の状況をシミュレートすることによって飛行能力を高めるために使用されています。
「平行」という言葉は幾何学的な設定を意味するのではなく、ここでの並列は個々のリンクの端点が他のものと完全に異なっていることを意味します。
5.多関節ロボット

産業用ロボットに関するテーマで話し合うとき、ほとんどの場合で「多関節ロボット」を指している事が多いです。これらのロボットは非常に汎用性が高く、上記で説明した他タイプのロボットとは異なり、工業作業に適しているからです。主な用途は、材料の取り扱い・塗布・溶接などが該当します。
6.極座標ロボット

洗練されたレベルに基づき、極座標ロボットはデカルトロボット・円筒形ロボットと洗練された多関節ロボットの間に位置します。基本的に極座標ロボットは球状の中型ロボットで、IDU(内部駆動ユニット)の助けを借りて動きます。
これらのロボットは監視作業に非常に有効であり、また水中で使用することができます。
車輪付きロボットと脚型ロボット
7.1輪ロボット
少なくとも一度は自転車やオートバイに乗ったことがあるとは思いますが、実際に一輪車に乗った人は何人いるでしょうか?私の場合、一度乗ってみたことがありますが座ることさえできませんでした。一輪車は自転車のように安定させるのが難しく、バランスが取りにくいため、適切なサポートがなければ即座に落ちてしまいます。
単輪ロボットを制作するにあたり、効率的かつ動作を安定させなければならないため、エンジニアにとって困難な課題です。一輪ロボットの一例が「MURATA GIRL」です。
ムラタガールやムラタセイコちゃん®は、日本のムラタ製作所によって製造された一輪車ロボットです。同社によると、彼女はバランスを維持することを可能にする高度なジャイロセンサー、通信のためのBluetoothデバイス、およびターゲット検出のための超音波センサーを持っています。このタイプのコンパクトロボットは、混雑した地域で便利です。
8.二輪ロボット
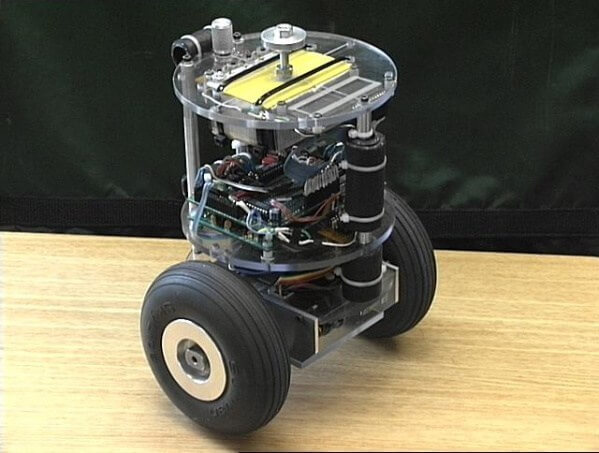
あなたは自分のロボットを作りたいですか?「作りたい」と答えた場合、小さな二輪ロボットは初めてのロボットとして適しています。必要なのは、動き回るモーターと2つの車輪のみ。彼らのシンプルで効果的なデザインは、今日の二輪ロボットが普及している理由です。
しかし他のロボットと同様に、彼らにも欠点が存在します。二輪ロボットは、両側に2つの車輪があるだけなのでバランスが悪く、常に直立した位置を維持するために動き続ける必要があります。より安定するために、電池は身体の真下に取り付けられています。
9.三輪ロボット
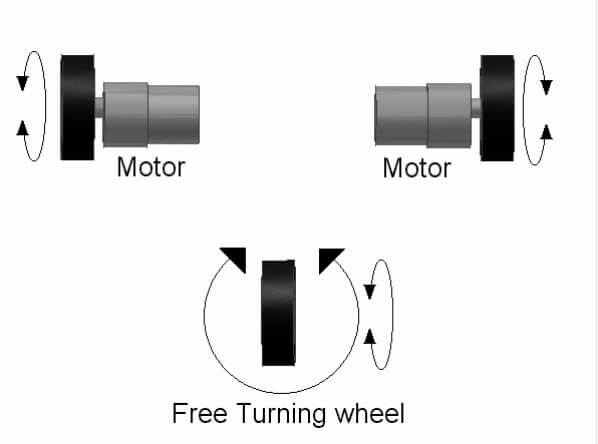
三輪ロボットは、一般的にハンドルの性質に基づいて、2つのタイプに分類されます。
1つ目は、2つの車輪は別々に動力を与えられ、第3の車輪はバランスのために自由に回転する(差動操縦)タイプのもの。2つ目は、2つのホイールは1つのソースで駆動され、3番目のホイールは別のソースによって動力を与えられるタイプのものがあります。
微分操縦型三輪ロボットの場合、動力を与えられた車輪が回転する相対速度を変えることで、ロボットが所定の時間に進む方向を変えることができる。2つの車輪の回転速度と方向が同じ場合、ロボットはまっすぐ進み続けます。
10.ヒューマノイドロボット

名前が示すように、ヒューマノイドロボットは人体を複製するロボットの一種です。ヒューマノイドロボットの設計は、他のタイプの移動ロボットとはかなり異なるものです。典型的なヒューマノイドロボットは、人間のように頭・2本の腕・胴体・2本の脚で構成されていますが、それらのロボットの多くは腰から上がるような動きがほとんどです。
ヒューマノイドロボットの主な構成要素の1つは、ロボットパラダイムにおいて極めて重要な役割を果たすセンサーであり、自己受容感覚と外受容感覚の2つに分類されます。自己受容感覚はロボットの向き・位置・その他の運動能力を感知し、外受容感覚はサウンドセンサーが含まれています。
11.三足歩行と四足歩行ロボット

三足歩行ロボットはそれほど一般的ではありません。しかし、バージニア州のロボット工学とメカニズムの実験室はSTriDERという名前の革命的な三足歩行ロボットを開発しました。これは、最小限の制御で動かすことが可能で、非常に効率的で受動的歩行ができる新しい概念を採用しています。
3足歩行ロボットとは対照的に、4足歩行ロボットは大変人気があります。四足歩行ロボットは、動いていないときは更に安定性が高くなります。多くの四足歩行ロボットは、左右交互のテクニックを使用して歩くことができます。四足歩行ロボットの例として、WildCat、チーター、ビッグドッグが挙げられます。
12.ヘキサポッドロボット

幾何学的に六角形は6面のポリゴンを意味するので、ヘキサポッドは6本の脚を持つロボットを意味すると皆さんは思うでしょう。その通りですが、ここでは意味が若干違うようです。ロボットは3本足で完全に安定しているので、ヘキサポッドロボットの残りの脚は大きな柔軟性を提供しロボットの能力を高めるために利用されます。
多くのヘキサポッドのデザインは、昆虫のヘキサポダ(ギリシャ語)の動き方からアイデアを得ています。またそれらのロボットは、昆虫の移動や運動制御に関する様々な生物学的理論をテストするためにも使用されます。
これらのヘキサポッドは、様々なタイプの歩行を展開します。最も一般的なものは次のとおりです。
・交互三脚: 6本中3本の脚だけが地面にとどまり、残りの3本は地面に付かない歩行方法
・クロール: 1脚ずつゆっくりと足を動す歩行方法。
13. ハイブリッドロボット
私たちは足や車輪を持つロボットを様々制作してきましたが、ロボット会社のボストン・ダイナミクスは、Handleという研究ロボットを制作しました。このロボットは、高さが約190cmあり、短い距離を時速9.5マイルで移動することができ、更に約120cmまで垂直にジャンプすることができます。
四足歩行ロボットでのバランスとモバイル操作から見られる基本的な作業原理を持っていますが、それは10個の関節しか使用しないので、他の歩行ロボットよりもはるかに簡単です。かなり荒れた地形・平らな芝などを脚や車輪で効率よく歩行することができるため、ロボットの「ハンドル」は実際に様々な条件下での作業を扱うことができます。
14.飛行ロボット

疑いの影もなく、飛行ロボットは最も人気のあるロボタイプです。現在、一部の大手多国籍企業では自動飛行機械でのビジネスを計画している程、注目度の高いロボットになります。
大手企業Amazonは、一部地域ですがドローンで商品の発送を開始しました。このドローンは25kmまで飛ぶことができ、30分未満で顧客に最大約2kgの重量を配達することができます。
15水泳ロボット

水泳ロボットは飛行ロボットと同じくらいクールです。唯一の違いは、飛ぶ代わりに泳ぐ点であり、これらのロボットは昆虫・魚・またはヘビの形を取ることができます。