地球を研究し、広大な宇宙を探索するために、NASAは人工知能(AI)の最近の進歩を利用しています。ジェット推進研究所(JPL)のAIグループは、科学分析、深宇宙ネットワーク運用、宇宙船指揮、宇宙輸送システムなどに応用される人工知能計画・スケジューリング分野の基礎研究を行っています。
この記事では、JPLが現在取り組んでいる主要プロジェクトのいくつかを詳しく説明します。そのほとんどは、計画技術、宇宙船の自律性、ローバー【惑星探査機】の自律性に関連するものです。
6. ASPEN
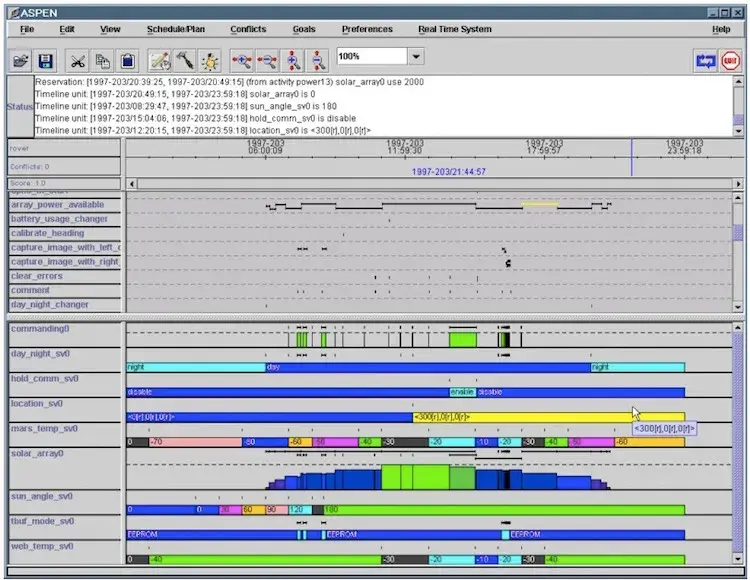
ASPEN GUI
JPLのAIグループは、ASPEN(Automated Scheduling and Planning Environmentの略)として知られるシステムに取り組んできました。これは、モジュール式で再構成可能なフレームワークであり、多くの種類のプランニングとスケジューリングアプリケーションをサポートすることができます。
このフレームワークには、時間推論システム、リソース管理システム、表現力豊かなモデリング言語、グラフィカル・インターフェースなど、複雑な計画やスケジューリング・システムに見られる要素を実装する様々な構成要素が含まれています。具体的には、ミッション設計計画、宇宙船運用、地表ローバー計画、協調型複数ローバー計画、複数ローバー計画で使用されます。
地上ベースのシステムとして、ASPENは内部宇宙船モデルと異なるハイレベルの目標を利用し、宇宙船が実行する特定のコマンドを提供します。飛行ベースのシステムとしては、ローバーの状態の更新を継続的に受信し、周囲の変化を反映して計画を更新します。アンテナ・スケジューリング・システムとしては、DSN【深宇宙通信情報網】ステーションを自律的に制御するために使用されます。
AI技術はヒューリスティック探索、反復修復、時間推論に基づいています。このフレームワークには、計画プロセスを効果的にするために、異なる伝搬アルゴリズムや検索エンジンから簡単に選択できる汎用的なアーキテクチャがあります。さらに、ユーザーはスケジュールとの相互作用で、迅速かつ効率的に再計画することができます。
今のところ、外部ライセンスが利用可能ですが、エクスポートはできません。将来的には、ASPENは修理計画と実行を統合するために使用される予定です。
5. MISUS
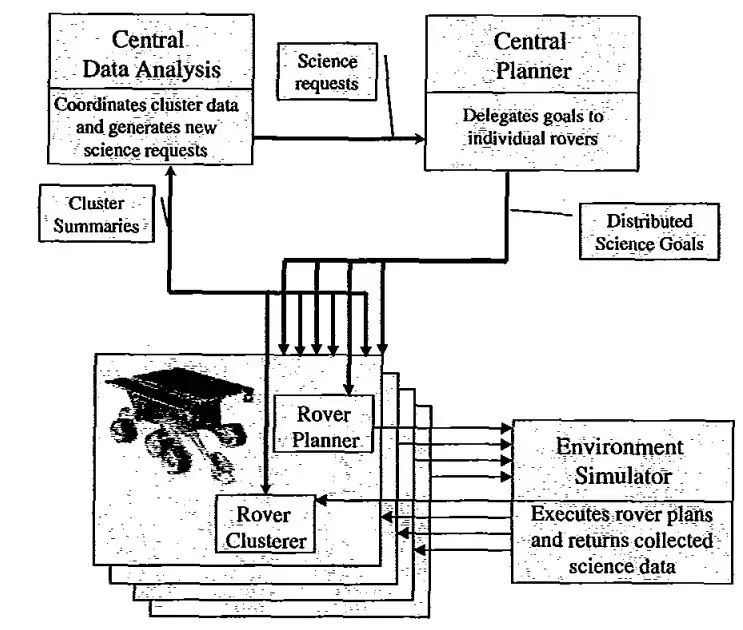
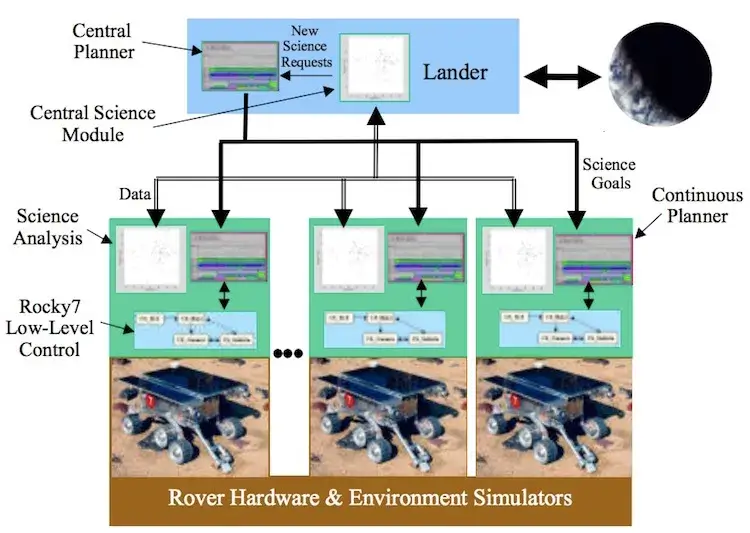
MISUS(Multi-Rover Integrated Science Understanding Systemの略)は、惑星探査用ローバーの制御技術を開発します。NASAが開発したMISUSアーキテクチャは、以下の3つの主要コンポーネントから構成されています。
データ分析:分散型機械学習システム。ローバーが観測した岩石タイプの分布をモデリングするための教師なしクラスタリングを実行します。惑星シーンの内容を継続的に改善するために、ローバーのセンシングを指示することができます。
プランニング:分散型プランニングシステム。入力されたローバーの科学目標を達成するための運用計画を生成します。ローバー間の科学目標を分割する中央プランナーと、個々のローバーの各作業に関連する分散プランナーセットがあります。
環境シミュレータ:複数のローバー・シミュレータ。複数の地質環境とローバーの科学操作をモデル化します。全周囲の科学データを扱い、操作を追跡し、ローバーの科学機器による観測を反映します。
システム全体は閉ループ方式で動作しており、データ解析システムは探査プロセスを推進する科学者と見なすことができます。まず、データはローバーのクラスタリング・アルゴリズムに送信され、ローバーは収集されたすべてのデータを更新されたグローバル・モデルに統合し、新しいモデルを分散クラスターにブロードキャストバックします。
クラスタリング出力は優先順位付けアルゴリズムによって使用され、モデルの精度をさらに向上させる新しい観測目標セットを生成します。ゴールは次に中央プランナーに送信され、中央プランナーは最も効率的に要求を処理する方法で個々のローバーをゴールに割り当てます。
各ローバーのプランナーは、割り当てられた目標をできるだけ多く達成するための具体的な行動を生成します。行動シーケンスはシミュレータに送られ、そこで実行され、収集された情報はローバークラスターに送り返されます。この一連のサイクルは、観測された岩石の種類に対して明確なクラスターを生成するのに十分な情報が収集されるまで続けられます。
4. 分散型宇宙船
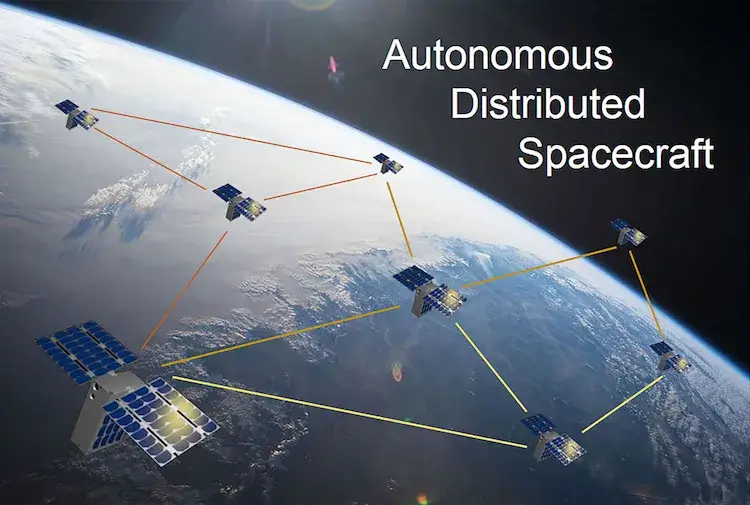
このプロジェクトでは、個々の宇宙船に対するコマンドシーケンスではなく、ミッション目標を持った宇宙船の一群を制御するために最新の技術を使用します。
この研究は、分散技術によって宇宙船の編隊とクラスターの高精度リアルタイム・シミュレーションを可能にするモデリングとシミュレーション能力を進歩させます。
NASAは、編隊の分散性を利用し、クラスター内の複数のプロセッサ間でシミュレーションを分割する新しいシミュレーション・アーキテクチャを開発しています。例えば、HYDRA (Hierarchical Distributed Reconfigurable Architectureの略)は、混在したマルチプラットフォーム環境にシームレスにシミュレーションモジュールや技術を展開するために開発されています。
HYDRAは、シミュレーションモジュール間の通信を自動化します。地球型惑星探査プログラムの一環として、FAST(Formation Algorithms and Simulation Testbedの略)に導入され、成功を収めています。
全体的な目的は、編隊飛行の誘導、推定、制御、意思決定の問題を解決できる、堅牢で高速なグローバル最適化アルゴリズムを構築することです。これには、編隊飛行のための高速分散推定器、宇宙機間の分散資源配分、堅牢な編隊維持制御、編隊燃料最適再構成経路計画、モード指令などが含まれます。
3. CASPER
CASPER (Continuous Activity Scheduling Planning Execution and Replanning の略) は、反復修復を利用して宇宙船の継続的な変更や修正をサポートします。
従来のバッチ指向の計画モデルにはいくつかの欠点があります。ゼロから計画を立てるには膨大な計算が必要であり、搭載されている計算資源は通常限られています。
目標は、プランナーをより効果的にし、予期せぬ変化に対応できるようにすることです。予測モデルへの依存を減らすことができるプランナーは、避けられないモデリング・エラーのようなものです。
これを達成するために、JPLはCASPERとして知られる連続プランニング技術を利用しています。プランナーには、現在の目標セット、状態、予想結果のモデルがあります。現在の状態に対する漸進的な更新はいつでも適用できます。この更新は、単純な時間進行の微調整から予期せぬ出来事まで、何でもあり得ます。
プランナーはさらに、入手可能な最新のデータを用いて一貫した計画を維持します。しかし、ほとんどの場合、物事は期待通りには進まないものです。そこでプランナーの出番となるわけです。プランナーは、シナリオに応じて継続的に計画を変更する準備ができています。
マルチ・ローバー実行アーキテクチャ
現在の反復修復プランニング・アプローチでは、初期状態や目的を段階的に変更し、競合を段階的に解決していきます。各反復の後、その効果は発見された競合に伝播され、計画が更新されます(例えば、計画修復アルゴリズムが呼び出される)。
この技術は、惑星ローバー作戦、ニューミレニアム地球周回1号、シチズンエクスプローラー、再利用性の高い宇宙輸送、分散型ローバー、修正南極マッピングミッションなどで使用されています。
2. 火山センサーウェブ
このプロジェクトでは、インターネットとソフトウェアによって自律衛星観測応答機能にリンクされたセンサーのネットワークを使用します。センサーの拡張、トリガー・シナリオや応答のカスタマイズを容易にするため、モジュール式の柔軟なアーキテクチャで開発されています。
現在までに、火山を調査するためのグローバルな監視プロジェクトの実施に使用されています。さらに、NASAは、雪氷圏の事象、洪水、大気現象を調査するためにセンサーウェブテストを実施しています。
センサーウェブの検出と対応アーキテクチャ
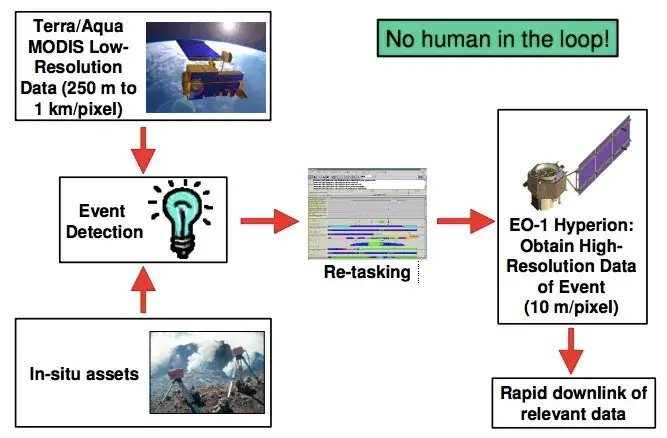
MODIS(Moderate Resolution Imaging Spectroradiometerの略【中分解能撮像分光計】)のデータは、ダイレクトブロードキャストを通じてほぼリアルタイムで利用できます。これらのデータは、素晴らしいセンシング能力で全球および地域をカバーしています。
しかし、これらの装置は、多くの科学用途に適した高解像度のデータを提供するものではありません。実際、これらの機器のほとんどは、需要の高い資産であり、制約が大きいのです。
火山センサーウェブでは、高分解能機器による観測のトリガーとして、高カバレッジで低分解能のセンサーが使用されます。また、センサーをセンサーウェブにネットワーク化する根拠は他にも数多くあります。例えば、自動応答によって、画像レーダーのような複雑な装置による観測が可能になるかもしれません。あるいは、時間分解能を向上させるために、観測頻度を上げるために使うこともできるでしょう。
今のところ、地球上で最も活発な50の火山の監視に使われています。さらにNASAは、山火事、洪水、極低温現象を監視する実験も行っています。
1. ASE
これまでのNASAのミッション(2000年以前)で使用されていた宇宙船は、宇宙空間で収集したデータをもとに、自ら自律的に判断する能力がありませんでした。しかし、2003年から地球観測1号ミッションでオンボード運用されているASE(Autonomous Sciencecraft Experimentの略)は、継続的なプランニング、オンボードのパターン認識、機械学習を用いて効率を高めています。
ASEのソフトウェアは、オンボードでの意思決定を用いて事象を特定、調査、対応し、最も価値の高いデータのみをダウンリンクする能力を示しています。
このAI技術には、以下のような数多くの有用なモジュールが含まれています。
・画像データを分析してトリガー条件を検出するオンボード科学アルゴリズム
・イベント駆動型処理と低レベル自律性を可能にする堅牢な実行管理ソフトウェア
・ダウンリンクのような重要な活動を再計画するCASPERソフトウェア
ASEは、地球科学、宇宙物理学、惑星科学における新たな可能性を幅広くもたらします。この技術は、異常によって失われるダウンタイムを減少させ、自律ソフトウェアを使用することで機器のセットアップ時間を短縮し、固定ダウンリンクあたりの技術を劇的に増加させます。
ASEにはもともと高レベルの目標をモニターするための科学ターゲットが含まれています。CASPERは、ターゲットを定期的にモニタリングするための計画を作成するために使用されます(Hyperion装置を使用)。搭載された科学アルゴリズムが画像を検査し、その検出結果に基づいて画像がダウンリンクされます。適切な事象がない場合、サイエンスソフトウエアは次に優先順位の高いターゲットを取得するようプランナーに命令します。
その後、SCLソフトウェアがCASPERによって生成された計画を異なる自律性要素と連携して実行し、このサイクルが後続の観測で繰り返されます。