・新しい自動運転車技術は、3Dマップを使用せずに地方をナビゲートすることができる。
・個々の道路セグメントをナビゲートするためのオープンストリートマップとローカルシステムを組み合わせたものである。
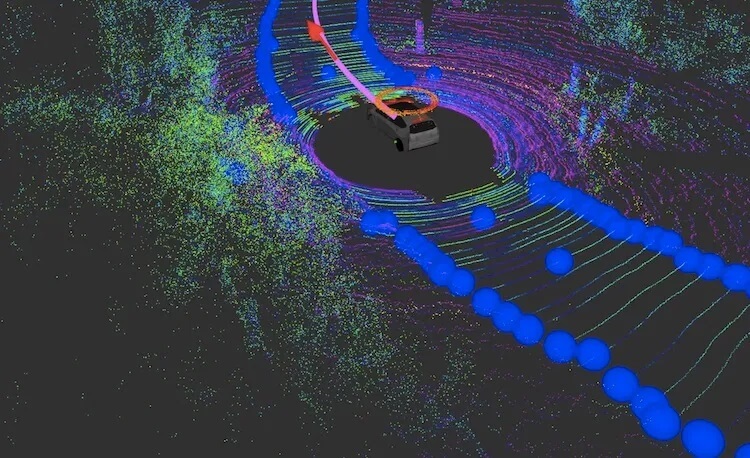
・マップレス走行のフレームワークは、LiDARセンサーを使って道路の境界をロバストに追跡する。
既存の自律走行車はナビゲーションのために3Dマップを必要とする。それが、自動運転車がすべての場所で実際に自動運転できない理由だ。実際、アメリカの道路の1/3以上は未舗装で、65%は信頼できる車線標識がない。
これらの車両は、あらかじめ設計された地図を使用して、現在地、進むべきルート、障害物を発見した場合の対処法を把握する。田舎道のほとんどは交通の便が悪いため、自律走行は非常に難しい。
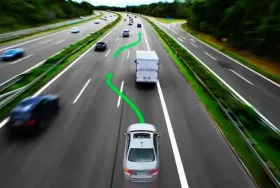
これに対処するため、MITのエンジニアたちは(トヨタ・リサーチ・インスティテュートと共同で)、こうした3D地図を使わずにナビゲートできる高度なシステム、マップレス・ドライビング・フレームワークを開発した。これにより、自動運転車はあまり通らない道を通ることができる。
その仕組みとは?
このフレームワークは、2つの重要なコンポーネント、すなわち、個々の道路セグメントをナビゲートするためのローカル知覚システムとオープンストリートマップを統合したものである。これらは、必要な事前ロード情報「オープンストリートマップ」の合理的な量で、広い領域でのグローバルナビゲーションを可能にする。
GPSデータは、地形学的な位置特定を可能にするのに十分な精度を持っている。したがって、オープンストリートマップには、各道路セグメントに関連するすべての指令が詰まっているため、完全な自律ナビゲーションシステムの問題に取り組むために、ローカルな知覚で補強することができる。
このシステムは、LiDARセンサーによって道路の境界をロバストに追跡する。道路標識がない場合でも、道路の表面エッジを測定し、道路形状を推定する。
車載センサーで操作できるこのようなフレームワークは、自動運転車の真の可能性を示している。巨大テック企業(グーグルのような)がマッピングした数以上の道路を実際に扱うことができるのだ。
テスト
開発者によれば、センサーが膨大な量のデータを収集するにもかかわらず、彼らの技術は信頼性が高く、効率的である(現在の道路境界推定値は次の測定ステップで使用される)。
確率的フレームワークでは、道路境界検出が車両オドメトリと融合される。開発者たちは、農村部で完全自律走行するトヨタ・プリウスでこのフレームワークをテストした。また、テスト現場から収集したデータセットを用いてオフラインでアルゴリズムを評価した。
この知覚フレームワーク一式は、標準的なコンピューター上で5ヘルツで実行され、35メートルまでの道路を検知することができる。この速度は、GPU上にフレームワークを実装(並列)することで向上させることができる。
このような技術により、自動運転車により多くの道路が開かれる可能性があるが、まだ道のりは長い。このシステムにはいくつかの限界がある。例えば、このフレームワークは急な高低差を考慮していない。
今のところ、開発者たちは多種多様な道路に対応できる車両を作るために努力している。最終的な目標は、不慣れな道でも人間と同じように運転できるようにすることだ。